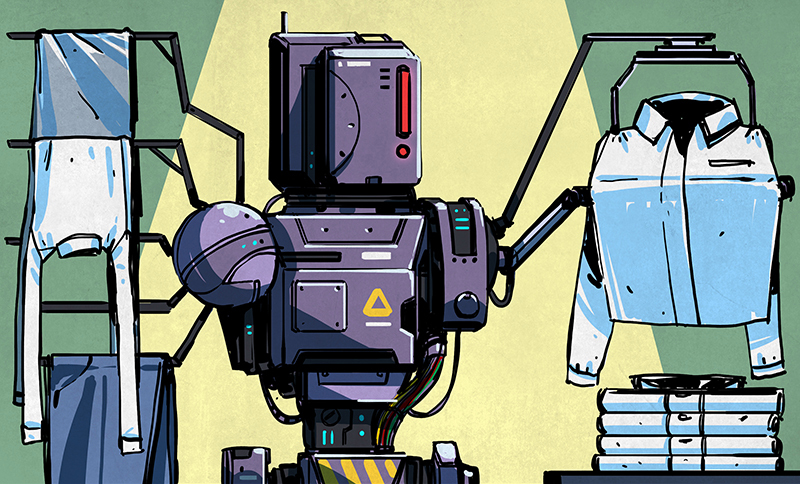
今年可能是通用型机器人的一年,我们去年在机器人领域有了一定发展,甚至是自动驾驶汽车也有很大提高。然而有哪些机器人能够进入我们的家庭?或许你需要一个人的洗衣房。
使用洗衣机清洗和干洗不是一个新概念。洗衣机和烘干机已成为司空见惯的事,我们并不认为它们是机器人。许多早期的机器是由汽油发动机提供动力,在乡村农舍电力是不常见的。从那时起,事情有了很大改善!从烘干机里,我们把洗衣机转移到一个篮子里,在那里它必须被折叠起来。正是这最后一步,产生了一个家政机器人的需求。
正如人们可以想象的那样,折叠洗衣房是一种对人类很简单,但对机器人来说很难的任务之一。然而,这并不是不可能的。像这样的项目将需要一个人或一群人在机械、电子、机器视觉和软件上的技能。
其实已经存在商用折叠机。酒店、医院和其他工业环境都有机器,可以处理大量的床单、毛巾和其他衣物。这些巨型机器在折叠的时候,即使有了现代的过程控制技术,他们仍然需要人工操作来手动加载每一个项目。

2010年,有团队使用了一个400000美元的PR2机器人进行尝试。虽然结果是有希望实现的,测试物是在一组有限的洗衣机里的毛巾和衣服。他们最后的研究论文详细介绍了他们的结果。
一个干净的洗衣篮是一种非结构化环境。白色,颜色,和印刷品都堆在一起。模式识别是可以进行的。机器人能做什么?

有一种方法是抓住某一东西,从篮子里拿出来,抖一下。但一般的机器人只能处理毛巾。它也有一个绿色辅助物的帮助,以监控它的工作。真正的世界洗衣店是不仅如此。例如,一些衣服上的衣服,例如T恤,在每个角落都没有明确的90度角。T恤也可以放在衣服里面,这是对一个洗衣折叠机器人的主要问题。
一个可以折叠洗衣机的机器人需要大量的软件。幸好有一些开源库。输入将来自摄像机。这意味着我们需要一个机器视觉包处理图像。这已经存在于opencv中。OpenCV是一个开源的计算机视觉软件包(BSD许可证),在从1999开始。自那时以来,它一直在不断改善。对于Mac,Windows,Linux存在的端口,以及Android和iOS。
输出将以手臂动作的形式出现。在机器人学方面,决定你想要一个机器人手臂移动的运动规划。其实计算每一个关节有多大的移动,当移动时,它们才能得到逆运动学。阅读运动规划和逆运动学是一个伟大的方式。那里有大量的研究。你可以很容易地找到自由软件来帮助运动规划和逆运动学方程。一个很好的例子是OpenRAVE。另一个选择是通过ROS(机器人操作系统)文档的页面,ROS是基于Linux的系统形式的PR2机器人的大脑。
接着是输入输出的方式,所有的左边是控制。这是软件将处理出来的OpenCV的数据和决定在移动手臂。折叠洗衣房有大量的变数。试图提出一个简单的算法,涵盖每一个可能的洗衣房将是不可能的(虽然我想被证明是错误的)。教一个机器人叠衣服的最好的办法就是这样做。我说的是机器学习,主要是神经网络。现在在机器学习上做了大量的工作。一个巨人谷歌,最近刚刚发布了tensorflow到开源世界。tensorflow是机器学习算法。它也在现实世界环境中使用,如谷歌语音搜索和谷歌图像。
所以你有它。一个快速的非常具有挑战性的问题,以及一些工具开始。这些只是我的想法。你会有什么不同?


.png)




